11 KiB
elbear_arduino_bsp
Пакет поддержки платы Elbear Ace-Uno на базе микроконтроллера MIK32 Амур в среде программирования Arduino IDE.
Установка пакета в ArduinoIDE
Для установки пакета в параметрах ArduinoIDE необходимо добавить ссылку https://elron.tech/files/package_elbear_beta_index.json в поле "Дополнительные ссылки для Менеджера плат".
Подробные шаги по установке и начальной настройке описаны в инструкции.
Функциональное назначение выводов
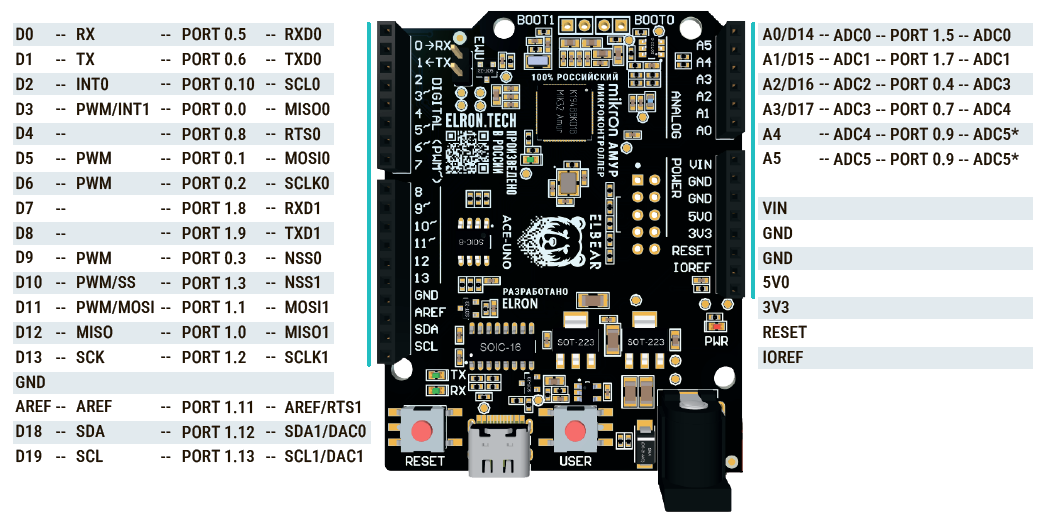
Особенности использования платы Elbear Ace-Uno в ArduinoIDE
Цифровые выводы
На плате Elbear Ace-Uno пользователю доступны встроенные светодиод и кнопка. Для их использования можно воспользоваться макросами LED_BUILTIN и BTN_BUILTIN, передавая их в качестве аргументов функции вместо номера цифрового вывода.
В отличие от стандартного функционала Arduino, на плате Elbear Ace-Uno невозможно управлять притяжками цифрового вывода, настроенного на вход, с помощью функции digitalWrite(). Для включения притяжки к питанию необходимо воспользоваться функцией pinMode(PinNumber, INPUT_PULLUP). Для изменения состояния цифровых выводов помимо стандартной функции digitalWrite() доступна функция digitalToggle(uint32_t PinNumber).
Аналоговые выводы
ADC
Разрешение встроенного в МИК32 АЦП составляет 12 бит, но возможно изменение разрешения в пределах от 1 до 32 бит с помощью функции analogReadResolution(). Разрешение АЦП по умолчанию составляет 10 бит. Функция analogRead() возвращает результаты измерения после усреднения по 10 значениям.
ШИМ
одновременно с разными частотами можно использовать только выводы, сидящие на разных таймерах. На таймере 1 - 3, 5, 6, 9. На таймере 2 - 10, 11.
D10 не может быть использован, если работает SPI.
Прерывания
На плате Elbear Ace-Uno доступно 6 выводов, позволяющих использовать прерывания с помощью функции attachInterrupt(). Это выводы D2, D3, D4, D5, D8, D9. Дополнительно доступно прерывание по встроенной кнопке при использовании макроса BTN_BUILTIN.
В микроконтроллере MIK32 предусмотрен всего один вектор прерывания. Когда срабатывает прерывание от любого источника, общая функция-обработчик последовательно проверяет все возможные источники и, при необходимости, вызывает соответствующие обработчики конкретных модулей. Поэтому важно, чтобы функции, вызываемые при прерываниях, выполняли минимально необходимый объем работы и обеспечивали как можно более быстрое завершение обработки. Это позволит избежать задержек и снизит риск пропуска последующих прерываний.
Общая функция-обработчик прерываний располагается в RAM памяти. Это позволяет устраненить задержки, связанных с кэшированием памяти при работе из FLASH памяти. Обработчики прерываний, назначаемые цифровым выводам с помощью функции attachInterrupt(), а так же обработчик прерывания для функции tone() так же располагаются в памяти RAM.
Serial
Для работы доступно два последовательных интерфейса. Нулевой интерфейс выведен на выводы D0, D1, для работы с ним используется экземпляр класса под названием Serial. Первый интерфейс доступен на выводах D7, D8, используемый экземпляр класса - Serial1.
Доступны следующие настройки режима работы каждого интерфейса: длина данных - 7 или 8 бит; четность - нет, четное, нечетное; стоп бит - 1 или 2 бита.
Предупреждения об ошибках
Если в скетче используется интерфейс Serial, при возникновении ошибок при использовании какой-либо функции из пакета в порт может передаваться сообщение об этой ошибке с пояснением. Например, если в функцию будет передан некорректный номер цифрвого вывода, предупреждение об этом появится в подключенном com порте.
По умолчанию вывод предупреждений включен. Если интерфейс Serial используется для коммуникации с другим устройством, вывод предупреждений можно отключить. Для этого в самом начале функции setup() необходимо вызвать макрос DISABLE_ERROR_MESSAGES();. Вывод предупреждений можно включить обратно, вызвав макрос ENABLE_ERROR_MESSAGES(); в любом месте программы.
Библиотеки, входящие в состав пакета
Входящие в состав пакета библиотеки используют периферию микроконтроллера MIK32 и адаптированы для работы с ним.
| Библиотека | Описание | Заметки |
|---|---|---|
| SPI | Библиотека для работы с интерфейсом SPI | Для работы используется встроенный SPI1. Доступные делители частот - SPI_CLOCK_DIV4, SPI_CLOCK_DIV8, SPI_CLOCK_DIV16, SPI_CLOCK_DIV32, SPI_CLOCK_DIV64, SPI_CLOCK_DIV128, SPI_CLOCK_DIV256, обеспечивают частоту работы от 125 кГц до 8 МГц. Скорость работы по умолчанию - 4 МГц. Для задания режима и скорости работы рекомендуется использовать функцию SPISettings(), а не соответствующие отдельные функции. |
| Wire | Библиотека для работы с интерфейсом I2C | Для работы используется встроенный I2C1. Доступные частоты работы интерфейса: 100 кГц (WIRE_FREQ_100K), 400 кГц (WIRE_FREQ_400K), 1000 кГц (WIRE_FREQ_1000K). Скорость работы по умолчанию - 100 кГц. В режиме работы в качестве ведомого устройства функции, заданные через onReceive() и onRequest(), выполняются в прерывании. |
| SoftwareSerial | Библиотека, реализующая программный последовательный интерфейс. | Доступные скорости работы - от 300 до 57600 бод. Для отправки данных (TX) можно использовать любой цифровой вывод. Для приема данных (RX) можно использовать только выводы, поддерживающие прерывания. Обработчик прерывания и связанные с ним функции располагаются в памяти RAM. |
| EEPROM | Библиотека для работы с памятью EEPROM | Для использования доступно 1024 байта встроенной EEPROM памяти. Для корректной работы библиотеки обязательно вызывать функцию EEPROM.begin() перед началом работы с памятью. |
| Servo | Библиотека для работы с сервоприводом | Любой цифровой вывод может использоваться для управления сервоприводом |
| NeoPixel | Библиотека для работы с адресными светодиодами |
Протестированные библиотеки
| Библиотека | Описание | Заметки |
|---|---|---|
| SD Library | Библиотека, позволяющая считывать и записывать информацию на карты SD |
v1.2.4 |
Полезные ссылки
При возникновении вопросов или выявлении проблем можно оставить заявку здесь.