22 KiB
elbear_arduino_bsp
Пакет поддержки плат на базе микроконтроллера MIK32 Амур в среде программирования Arduino IDE.
Установка пакета в ArduinoIDE
Для установки пакета в параметрах ArduinoIDE необходимо добавить ссылку https://elron.tech/files/package_elbear_beta_index.json в поле "Дополнительные ссылки для Менеджера плат".
Подробные шаги по установке и начальной настройке описаны в инструкции.
Платы, входящие в состав пакета
Пакет включает в себя поддержку следующих плат:
- ELBEAR ACE-UNO 8 Mb / 16 Mb / 32 Mb
- ELBEAR ACE-NANO
- ELSOMIK
- START-MIK32
Особенности использования пакета в ArduinoIDE
Цифровые выводы
В отличие от стандартного функционала Arduino на платах, входящих в состав пакета, невозможно управлять притяжками цифрового вывода, настроенного на вход, с помощью функции void digitalWrite(uint32_t PinNumber, uint32_t Val). Для включения притяжки к питанию необходимо воспользоваться функцией void pinMode(PinNumber, INPUT_PULLUP).
Для инвертирования состояния цифровых выводов доступна функция void digitalToggle(uint32_t PinNumber).
Аналоговые выводы
АЦП
Встроенный в MIK32 АЦП обладает разрешением 12 бит, однако по умолчанию в Arduino IDE применяется разрешение 10 бит. С помощью функции void analogReadResolution(uint8_t resolution) можно изменять разрешение в диапазоне от 1 до 32 бит.
Функция uint32_t analogRead(uint32_t PinNumber) возвращает результаты измерения после усреднения по 10 значениям.
Номера выводов, поддерживающих АЦП, отличаются для каждой платы и перечислены в их описаниях.
ШИМ
По умолчанию частота сформированного ШИМ-сигнала составляет 1 кГц. Функция void analogWriteFrequency(uint32_t freq) позволяет изменить частоту сигнала в диапазоне от 1 Гц до 1 МГц.
По умолчанию разрешение, используемое в функции void analogWrite(uint32_t PinNumber, uint32_t writeVal), составляет 8 бит. Функция void analogWriteResolution(uint8_t resolution) позволяет измененить разрешение в диапазоне от 1 до 32 бит.
Остановить генерацию ШИМ-сигнала можно, вызвав функцию void analogWriteStop(uint32_t PinNumber) или функции void digitalWrite(uint32_t PinNumber, uint32_t Val)/int digitalRead(uint32_t PinNumber).
Номера выводов, поддерживающих ШИМ, отличаются для каждой платы и перечислены в их описаниях.
Прерывания
Платы, входящих в состав пакета, позволяют использовать прерывания, настраиваемые функцией void attachInterrupt(uint8_t interruptNum, void (*userFunc)(void), int mode). Номера выводов, поддерживающих прерывания, отличаются для каждой платы и перечислены в их описаниях.
Для получения номера прерывания по номеру вывода существует функция int8_t digitalPinToInterrupt(uint32_t digPinNumber).
В микроконтроллере MIK32 предусмотрен всего один вектор прерывания. Когда срабатывает прерывание от любого источника, общая функция-обработчик последовательно проверяет все возможные источники и, при необходимости, вызывает соответствующие обработчики конкретных модулей. Поэтому важно, чтобы функции, вызываемые при прерываниях, были небольшими и обеспечивали максимально быстрое завершение обработки. Это позволит избежать задержек и снизит риск пропуска последующих прерываний.
Общая функция-обработчик прерываний располагается в RAM памяти. Это позволяет устранить задержки, связанные с кэшированием при работе из FLASH памяти. Обработчики прерываний, назначаемые на цифровые выводы с помощью функции void attachInterrupt(uint8_t interruptNum, void (*userFunc)(void), int mode), и обработчик прерывания для функции tone() так же располагаются в памяти RAM.
Глобальное разрешение прерываний активируется после завершения функции setup(). Если необходимо использовать прерывания внутри самой функции setup(), их можно включить вручную, вызвав функцию interrupts() перед вызовом функций, работающих с прерываниями. Прерывания используются для приема данных модулями Serial, Wire, для работы библиотеки Servo, функцией tone().
Serial
Для работы доступно два последовательных интерфейса. Нулевой интерфейс используется экземпляром класса Serial. Информации в Монитор порта в Arduino IDE поступает через него. Первый интерфейс используется экземпляром класса Serial1. Выводы, на которых доступны указанные интерфейсы, перечислены в описании отдельных плат.
Доступны следующие макросы для настройки режима работы каждого интерфейса в функции Serial.begin(): SERIAL_7N1, SERIAL_8N1, SERIAL_7N2, SERIAL_8N2, SERIAL_7E1, SERIAL_8E1, SERIAL_7E2, SERIAL_8E2, SERIAL_7O1, SERIAL_8O1, SERIAL_7O2, SERIAL_8O2. Здесь длина данных - 7 или 8 бит; бит четности - нет(N), четный(E), нечетный(O); стоп бит - 1 или 2 бита.
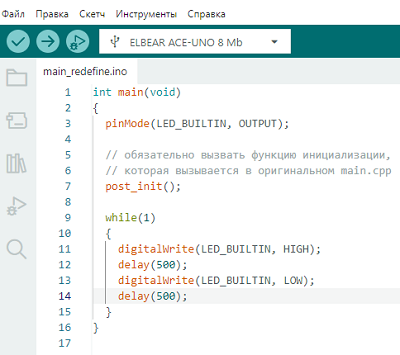
Переопределение функции main
В ArduinoIDE доступна возможность определить пользовательскую функцию main() в скетче. Для этого необходимо удалить из скетча функции setup() и loop() и определить свою функцию int main(void){}. Чтобы весь функционал пакета поддержки работал корректно, перед заходом в бесконечный цикл необходимо вызвать функцию post_init(), внутри которой глобально разрешаются прерывания. Пример переопределения представлен ниже.
Предупреждения об ошибках
Если в скетче используется интерфейс Serial, при возникновении ошибок при использовании какой-либо функции из пакета в порт может передаваться сообщение об этой ошибке с пояснением. Например, если в функцию будет передан некорректный номер цифрового вывода, предупреждение об этом появится в подключенном com порту.
По умолчанию вывод предупреждений включен. Если интерфейс Serial используется для коммуникации с другим устройством, вывод предупреждений можно отключить. Для этого в самом начале функции void setup() необходимо вызвать макрос DISABLE_ERROR_MESSAGES();. Вывод предупреждений можно включить обратно, вызвав макрос ENABLE_ERROR_MESSAGES(); в любом месте программы.
Библиотеки, входящие в состав пакета
Входящие в состав пакета библиотеки используют периферию микроконтроллера MIK32 Амур и/или адаптированы для работы с ним.
| Библиотека | Описание | Заметки |
|---|---|---|
| SPI | Библиотека для работы с интерфейсом SPI | Для работы доступно два экземпляра класса - SPI (используется аппаратный SPI1) и SPI1 (используется аппаратный SPI0). Выводы, на которых доступны интерфейсы, перечислены в описании каждой платы. Доступные делители частоты - SPI_CLOCK_DIV2, SPI_CLOCK_DIV4, SPI_CLOCK_DIV8, SPI_CLOCK_DIV16, SPI_CLOCK_DIV32, SPI_CLOCK_DIV64, SPI_CLOCK_DIV128, SPI_CLOCK_DIV256, обеспечивают частоту работы от 125 кГц до 16 МГц. Скорость работы по умолчанию - 4 МГц. Для задания режима и скорости работы рекомендуется использовать SPISettings(uint32_t speedMaximum, uint8_t dataOrder, uint8_t dataMode), а не соответствующие отдельные функции |
| Wire | Библиотека для работы с интерфейсом I2C | Для работы используется встроенный I2C1. Доступные частоты работы интерфейса: 100 кГц (WIRE_FREQ_100K), 400 кГц (WIRE_FREQ_400K), 1000 кГц (WIRE_FREQ_1000K). Скорость работы по умолчанию - 100 кГц. В режиме работы в качестве ведомого устройства функции, заданные через void onReceive( void (*)(int) и void onRequest( void (*)(void) ), выполняются в прерывании |
| SoftwareSerial | Библиотека, реализующая программный последовательный интерфейс. | Доступные скорости работы - от 300 до 57600 бод. Для отправки данных (TX) можно использовать любой цифровой вывод. Для приема данных (RX) можно использовать только выводы, поддерживающие прерывания. Обработчик прерывания и связанные с ним функции располагаются в памяти RAM |
| EEPROM | Библиотека для работы с памятью EEPROM | Для использования доступно 1024 байта встроенной EEPROM памяти. Для корректной работы библиотеки обязательно вызывать функцию void EEPROM.begin() перед началом работы с памятью |
| Servo | Библиотека для работы с сервоприводом | Библиотека использует 16-битный таймер 2 и прерывания от него. Любой цифровой вывод подходит для управления сервоприводом. Одновременно можно использовать до 12 сервоприводов. Для работы библиотеки используется таймер timer16_2 |
| NeoPixel | Библиотека для работы с адресными светодиодами | Функция, выводящая состояние пикселей на цифровой вывод платы, перенесена в память RAM для корректной работы на MIK32 Амур |
| MFRC522 | Библиотека для работы с RFID картами | Исправлен баг, вызывающий ошибку компиляции в новых компиляторах gcc |
| OneWire | Библиотека для работы с интерфейсом 1-Wire | В стандартную библиотеку добавлена поддержка микроконтроллера MIK32 Amur |
| IRremote | Библиотека позволяет отправлять и принимать инфракрасные сигналы, используя определенный набор протоколов | В стандартную библиотеку добавлена поддержка микроконтроллера MIK32 Amur. При приеме данных используется прерывание таймера timer16_0, работает с любым цифровым выводом. Для отправки данных с помощью встроенного ШИМ для плат Elbear Ace-Uno используется вывод D3, для платы START-MIK32 - вывод P0_0 |
| FreeRTOS | Библиотека для работы с операционной системой реального времени FreeRTOS | В стандартную библиотеку добавлена поддержка микроконтроллера MIK32 Amur. Период системного тика составляет 10 мс и формируется с помощью машинного таймера SysTick |
Протестированные библиотеки
| Библиотека | Описание |
|---|---|
| RFID_MFRC522v2 | Новая версия библиотеки MFRC522 для работы с RFID картами |
| SD | Библиотека, позволяющая считывать и записывать информацию на SD карты |
| TimeLib | Библиотека для удобной работы с переменными времени |
| Ds1302 | Библиотека для работы с микросхемой часов реального времени DS1302 |
| DS1307RTC | Библиотека для работы с микросхемой часов реального времени DS1307 |
| microDS3231 | Легкая библиотека для работы с микросхемой часов реального времени DS3231 |
| Rtc | Библиотека для работы с разными микросхемами часов реального времени |
| AHT10 | Библиотека для работы с датчиками температуры и влажности AHT10, AHT15, AHT20 |
| DHT | Библиотека для работы с датчиками температуры и влажности типа DHT |
| Adafruit_BMP280 | Библиотека для работы с датчиками давления и высоты BMP280 |
| MPU6050 | Библиотека для работы с акселерометром/гироскопом MPU6050 |
| Kalman | Библиотека, реализующая фильтр Калмана |
| LiquidCrystal_I2C | Библиотека для управления LCD дисплеями по интерфейсу I2C |
| JoystickShield | Библиотека для работы с шилдом JoystickShield |
| RF24 | Драйвер радиоустройств, библиотека для работы с микросхемами nRF24L01(+) |
| Bonezegei_ULN2003_Stepper | Библиотека драйвера шагового двигателя, управляемого микросхемой ULN2003 |
| Ethernet | Библиотека, позволяющая использовать Ethernet шилд для подключения к Интернету |
| AGS10_sensor | Библиотека для работы с датчиком газа AGS10 |
| TinyGPSPlus | Библиотека позволяет расшифровать данные GPS, сформированные по протоколу NMEA |
| GPRS_Shield_Arduino | Библиотека для Arduino, позволяющая управлять GPRS Shield’ом от Амперки |
| Adafruit GFX | Базовая графическая библиотека, от которой происходят все остальные графические библиотеки Adafruit |
| Adafruit_SH110X | Библиотека драйверов SH110X OLED для монохромных дисплеев с драйверами SH1107 или SH1106G |
| Adafruit_SSD1306 | Библиотека драйвера SSD1306 OLED для монохромных дисплеев с расширениями 128x64 и 128x32 |
| Adafruit_ST7789 | Библиотека для работы с дисплеем ST7789 по SPI |
| Adafruit_ILI9341 | Библиотека для работы с дисплеем Adafruit ILI9341 |
| TFT | Графическая библиотека, совместимая с большинством TFT-дисплеев на базе чипа ST7735 |
| Adafruit_TCS34725 | Библиотека для работы с датчиком цвета с ИК-фильтром TCS34725 |
| DS18B20 | Библиотека для работы с однопроводным датчиком температуры DS18B20 |
Протестированные модули
Список модулей и шилдов, работа которых была протестирована на платах, входящих в состав пакета поддержки, доступен здесь.
Режим отладки
Для всех плат, входящих в состав пакета, доступен режим отладки скетча в ArduinoIDE версии 2. Подготовка к работе в режиме отладки описана в инструкции.
Полезные ссылки
- Описание плат ELBEAR
- Материалы по платам ELBEAR
- Материалы по платам ELSOMIK
- Материалы по плате START-MIK32
- Телеграмм-канал компании
При возникновении вопросов или выявлении проблем можно оставить заявку здесь.